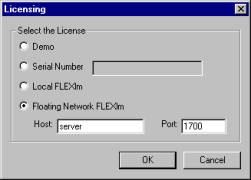
2. FlexLM licensing
The flexibility of FlexLM licensing, e.g., network licensing across subnets,
is added to Working Model 2004. New WM2004 license options include:
- Counted node-locked single-user license
- Multi-user license through a network server
Working Model 2004 also supports existing hardware dongle license options
without additional charge. New or replacement hardware dongle license are
available with additional charge. WM2004 also supports educational licensing
with proof of full-time academic affiliation and use.
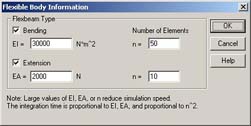
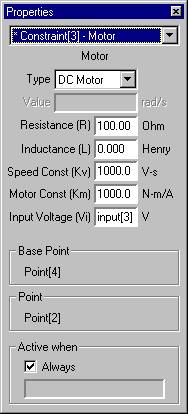
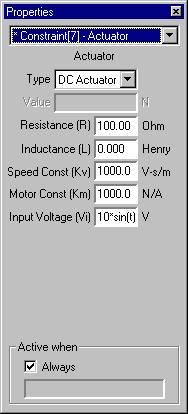
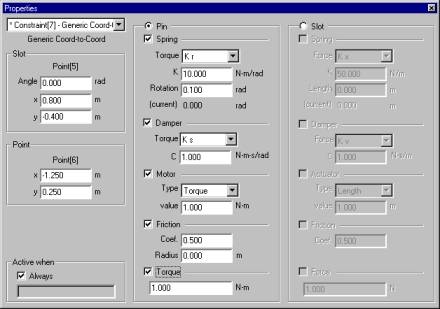
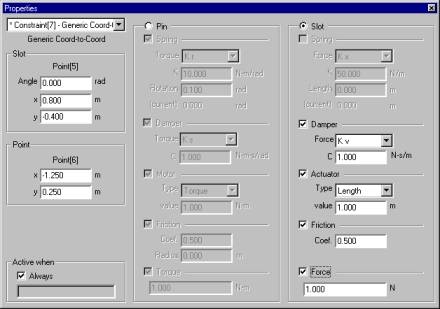
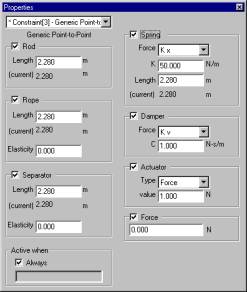
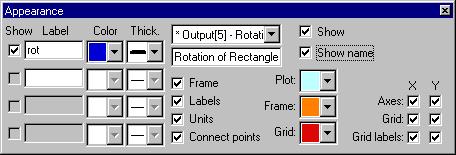
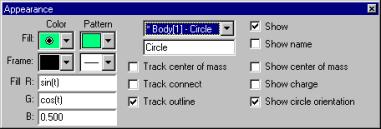
The value of these parameters can be set with a number, slider, or any
Interactive Physics formula.