|
The DYNASIM is a user-friendly ship dynamics simulator that incorporates
Systems Identification Techniques to determine ship maneuvering characteristics.
Once these parameters are known the simulator can faithfully reproduce ship
motion in the presence of waves, wind, currents, and obstacles or other ships.
Multithreading enables simultaneous simulation of multiple ships. The initial
efforts to develop the technology were funded by Small Business Innovation
Research (SBIR) awards from the National Science Foundation the Department of
Defense and The National Oceanic and Atmospheric Administration.
Capabilities:
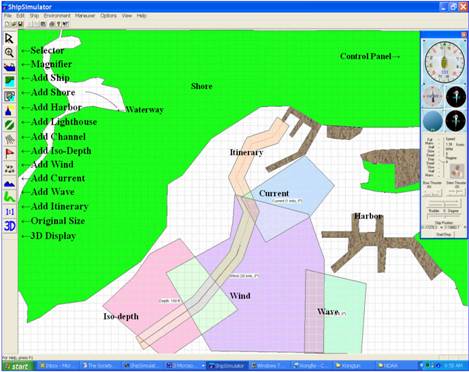
DYNASIM is a ship maneuvering simulator that incorporates state of the art
models of ship motion and is capable of executing simulations of ship maneuvers
in complex environment in real or accelerated time. It employs modular
mathematical models for the various components of the ship (hull, propeller(s),
rudder(s), thrusters) and environmental effects (wind, current, waves) and
waterways (bottom, pier walls) to achieve a sophisticated and faithful
mathematical model for the ship. These models are based on collective experience
resulting from development of many simulators. DYNASIM runs on virtually any
modern PC with a Windows operating system (NT, 2000, XP) and has a user-friendly
interactive graphic interface. It achieves capabilities not found on expensive
stand-alone full-mission simulators on easily accessible computers.
The simulator has three simulation modes:
- Fully user controlled
- Standard ship certification maneuvers
- Computer controlled (auto-piloted) maneuvers along prescribed routes
In the user controlled mode, the user controls the rudder, the engine, and
lateral thrusters through a graphic control panel to simulate navigation of a
ship. In the standard maneuver mode, DYNASIM can simulate a ship performing one
of the classical maneuvers recommended by the International Maritime
Organization (IMO) for evaluating the hydrodynamic characteristics and
maneuverability of a ship.
Under the computer controlled maneuvers mode, the simulator can model ship
traffic in the open ocean or in a restricted environment. The behaviors of the
ships in the simulation are based on the U.S. Code of Conduct of Vessels.
Traffic central parameters can also be adjusted by the users.
Extensions:
An additional unique feature about the DYNASIM software package is its ability
to fine tune the mathematical model to a particular ship's evolving
characteristics thus achieving accurate predictions of the motion of that ship.
This is accomplished by employing a novel Systems Identification algorithm. The
identification procedure is an inverse problem that uses as input already
recorded data about the ship that is available as part of IMO guidelines (turning
circle and zigzag data) or observations on-board of the ship response to
maneuvering sequences. Advances in the identification algorithm enable the
identification to be performed very quickly. The algorithm for identification is
based on a multi-objective identification algorithm, which was developed using a
grant by the U.S. National Science Foundation. Additional grants were obtained
from the Office of Naval Research (under a Phase I and a Phase II on-going SBIR
grant Navy SBIR) in support of the AAAV office.
Applications:
DYNASIM can be used to generate multiple ship tracks to evaluate harbor
safety from a system perspective and estimate the likelihood of collision for
various types of vessels, traffic densities, navigation channels geometries and
environmental conditions. It can also be used for continual training of masters
and pilots in making decisions during ship operations to minimize human error,
and by harbor designers and port managers for structures and waterway design,
modification, improvement and implementation of safety measures.
|