COSMOSMotionde SolidWorks
Vaya más allá de la simulación física de SolidWorks® gracias a COSMOSMotion?, el mejor software de simulación de
movimiento basado en la física ideado para diseñadores e ingenieros que están interesados en entender el rendimiento
de sus ensamblajes de SolidWorks.
COSMOSMotion simula el funcionamiento mecánico de ensamblajes motorizados y calcula las fuerzas físicas que se generan. Mediante la determinación de factores tales como el consumo de electricidad y la interferencia existente entre las piezas, COSMOSMotion puede ayudarle a determinar si un diseño fallará, qué piezas pueden fallar y los riesgos de seguridad existentes.
SolidWorks eleva su potencia.
COSMOSMotion trabaja dentro de la ventana de SolidWorks y utiliza la información de ensamblaje existente para generar estudios de simulación de movimiento.
- Correlación automática de relaciones de posición de SolidWorks para derivar condiciones de unión de movimiento.
- Transferencia automática de propiedades de materiales definidos en SolidWorks.
- Reutilización de datos de simulación física en COSMOSMotion para obtener una simulación de movimiento realista basada en la física.
 Con COSMOSWorks podrá transferir cargas perfectamente para realizar análisis de esfuerzos. Con COSMOSWorks podrá transferir cargas perfectamente para realizar análisis de esfuerzos.
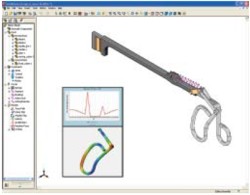
Con la transferencia perfecta de cargas de COSMOSMotion a COSMOSWorks, podrá visualizar los esfuerzos y desplazamientos de un componente en un solo instante de tiempo o durante todo el ciclo de la simulación.
Simulación de condiciones de funcionamiento reales.
Mediante la combinación del movimiento basado en la física con la información de ensamblaje procedente de SolidWorks, COSMOSMotion puede utilizarse en un ámbito más amplio de aplicaciones industriales.
- Estimación de la potencia máxima del motor cuando se realicen tareas como poner reflectores de antena, abrir y cerrar puertas de seguridad, manejar materiales y subir y bajar plataformas elevadoras del tipo tijeras. Asimismo, se puede ver cómo la fricción incrementará las necesidades eléctricas y el tamaño de los actuadores.
- Conocimiento detallado del rendimiento de la robótica durante el funcionamiento, por ejemplo; en la instalación de un parabrisas, o al seleccionar o colocar componentes electrónicos en placas de circuitos.
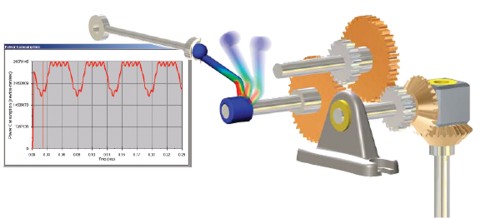
- Optimización o reducción del desequilibrio de fuerzas de un sistema rotatorio en lijadoras orbitales, máquinas de coser, ejes motor, etc.
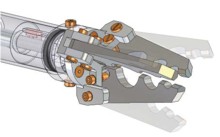
- Modificación de la longitud del diseño de los sistemas articulados de una retroexcavadora para proporcionar un mejor rendimiento de la excavación.
- Generación de curvas CAM (perfiles) empleadas en mecanismos de avance automático y máquinas roscadoras.
- Representación de interacciones entre distintos engranajes (rectos, de trabajo, helicoidales y de piñón-cremallera) utilizados en diferentes tipos de transmisión de energía o control de movimientos.
- Realización de puestas a punto básicas de la suspensión para aplicaciones de embalado.
 Asocie modelos físicos a condiciones de ingeniería. Asocie modelos físicos a condiciones de ingeniería.
COSMOSMotion ofrece varios tipos de opciones de unión y de fuerza para representar condiciones de funcionamiento reales.
- Creación de diferentes uniones compuestas para representar condiciones como, por ejemplo, articulaciones, tornillos, esféricas, cilíndricas, planas y universales.
- Construcción de primitivas de unión para aplicar limitaciones geométricas estándar.
- Uso de fuerzas de sólo acción para controlar el índice de aceleración y la velocidad al diseñar actuadores
- Aplicación de funciones constantes, armónicas, spline por puntos y paso a paso a uniones y fuerzas.
- Creación de acopladores articulados (engranajes cinemáticos) para permitir el movimiento entre diferentes tipos de engranajes para la transmisión de energía.
- Definición de resortes lineales y no lineales en aplicaciones que no tienen una rigidez torsional y flexional cuando se extienden.
- Representación de fuerzas y momentos de acción/reacción
- Uso del punto-a-curva y curva-a-curva (con la fricción estática y la dinámica) para representar las restricciones CAM.
- Definición de contactos 3D (con la fricción estática y la dinámica) para capturar la interacción existente entre dos o más partes en contacto.
- Uso de los cojinetes isotrópicos u ortotrópicos para dar flexibilidad a las uniones mecánicas.
- Incluye el efecto de la gravedad.
Interprete los resultados con unas herramientas de visualización potentes e intuitivas.
Tras haber completado la ejecución de la simulación de movimiento, COSMOSMotion ofrece una gama de herramientas de visualización de resultados que le permiten obtener unos valiosos conocimientos del rendimiento del diseño.
- Creación de trazados XY de datos numéricos para todo el ciclo de simulación.
- Representación de múltiples trazados XY en la misma gráfica.
- Visualización de vectores de desplazamiento, velocidad, aceleración y fuerza en las ubicaciones de las uniones.
- Visualización del trazado de cualquier punto de un cuerpo durante una simulación y generación de una curva de referencia directamente sobre una pieza de SolidWorks.
- Comparación de trazados de diseños diferentes que permiten crear un historial de la información sobre cómo pueden variar los resultados en el ensamblaje.
- Comprobación de si hay piezas en colisión cuando se mueve el ensamblaje.
- Animación de una representación del resorte en 3D durante la simulación.
Colabore y comparta los resultados de análisis.
COSMOSMotion le permite colaborar y compartir los resultados de análisis de forma eficaz entre las personas relacionadas con el proceso de desarrollo del producto.
- Uso de los formatos AVI o VRML de COSMOSMotion para capturar y comunicar el movimiento físico a los demás.
- Generación de gráficas con datos numéricos en el formato Microsoft Excel en cualquier sistema de coordenadas.
- Exportación de gráficas a través de diferentes cuadros de referencia (pieza).
Requisitos del sistema
- SolidWorks 2006 o posterior
- Se recomienda Microsoft® Windows® XP Professional o Windows 2000
- Procesador basado en Intel® Pentium®, Intel Xeon™, Intel EM64T, AMD Athlon™ o AMD Opteron™
- 512 MB de RAM o superior
- Dispositivo de puntero
- Unidad de CD-ROM
- Microsoft Office XP o Microsoft Office 2000
|
